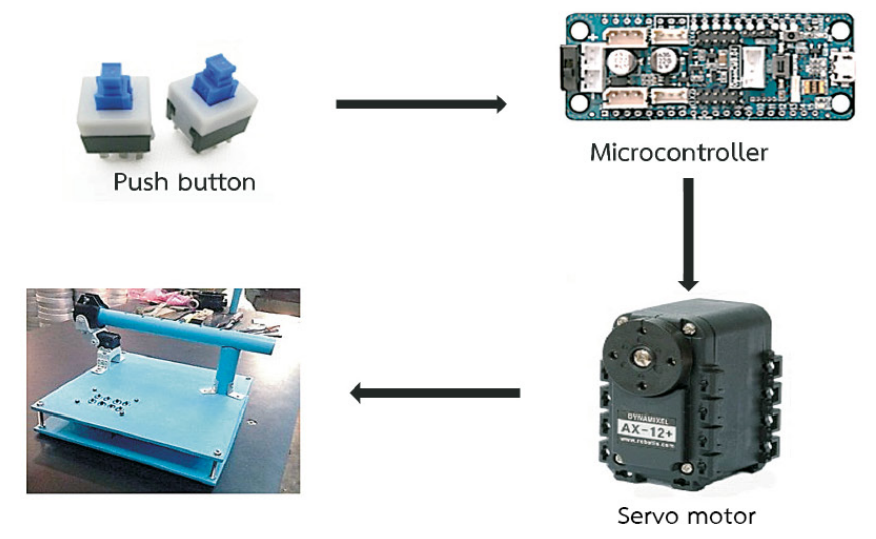
ภาพที่ 5 บล็อกไดอะแกรมการพัฒนาระบบการควบคุม
การทำงานของบล็อกไดอะแกรม
- ระบบการควบคุม Servo
motor โดยสั่งการด้วยสวิตช์ ประกอบด้วย
3 ส่วนหลัก คือ 1) Push botton
2) Microcontroller 3) Servo motor - หลักการทำงานของการควบคุม
Senvo motor เพื่อปรับเปลี่ยนมุม เราจะ
ทำการเขียนโค้ดในโปรแกรม ROBOTIS
Open CM - ระบบจะทำการส่งสัญญาณไป
ยังไมโครคอนเทรลเลอร์และไมโครคอน
เทรลเลอร์จะทำการประมวลผลและส่ง
สัญญาณไปยัง - Servo motor เพื่อสั่งการให้
Servo motor หมุนทำให้ปรับเปลี่ยนมุม
ตามคำสั่ง